In my current position as Director of Undergraduate Studies for the Georgia Tech School of Mathematics, I’ve been heavily involved with revamping our linear algebra curriculum. So I’ve spent a lot of time lately reading through various linear algebra books. The goal of this post is to give a self-contained proof of the existence and uniqueness of the Jordan Canonical Form which is somewhat different from the ‘usual’ proofs one finds in textbooks. I’m not claiming any novelty — I’m sure this approach has been discovered before — but I don’t know a good reference so I thought I’d record the details here.
The proof I give here does not use properties of polynomials (e.g. the Chinese Remainder Theorem), nor does it rely on the classification of finitely generated modules over a PID, so it might be of some pedagogical interest. The proof I give for the Generalized Eigenvector Decomposition is based on an auxiliary result — the Fitting Decomposition — which in my opinion ought to be better known. The proof I give of the structure theorem for nilpotent operators comes from these lecture notes of Curt McMullen (Theorem 5.19). It is particularly concise compared to some other arguments I’ve seen.
Jordan Canonical Form
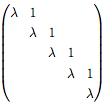
Recall that an elementary Jordan block  is an
is an  matrix of the following form (illustrated with
matrix of the following form (illustrated with  ):
): A matrix is in Jordan Canonical Form if it is a block sum of elementary Jordan blocks, for example:
A matrix is in Jordan Canonical Form if it is a block sum of elementary Jordan blocks, for example:
The theorem we wish to prove is that, over an algebraically closed field  , every
, every  matrix is similar to a matrix in Jordan Canonical Form, and the latter is unique up to rearranging the elementary Jordan blocks. Thus two matrices are similar over if and only if they have the same Jordan Canonical Forms (up to rearranging the blocks). More canonically, we want to show that if
matrix is similar to a matrix in Jordan Canonical Form, and the latter is unique up to rearranging the elementary Jordan blocks. Thus two matrices are similar over if and only if they have the same Jordan Canonical Forms (up to rearranging the blocks). More canonically, we want to show that if  is a finite-dimensional vector space over and
is a finite-dimensional vector space over and  is a linear operator, then is direct sum of
is a linear operator, then is direct sum of  -invariant subspaces
-invariant subspaces  such that the matrix of restricted to (with respect to some ordered basis
such that the matrix of restricted to (with respect to some ordered basis  ) is an elementary Jordan block. The latter condition means that there is
) is an elementary Jordan block. The latter condition means that there is  and a vector
and a vector  with
with  such that
such that  is a basis for .
is a basis for .
Fitting Decomposition
Let  be a finite dimensional vector space over a field
be a finite dimensional vector space over a field  , and let
, and let  be a linear endomorphism.
be a linear endomorphism.
Theorem 1 (Fitting Decomposition): There is a unique direct sum decomposition  with the following properties:
with the following properties:
1. (1) Both  and
and  are
are  -invariant.
-invariant.
2. (2) is nilpotent on .
3. (3) is invertible on .
Proof: The chain  must stabilize to a -invariant subspace and the chain
must stabilize to a -invariant subspace and the chain  must stabilize to a -invariant subspace .
must stabilize to a -invariant subspace .
We claim that is nilpotent on and is invertible on . Indeed, it is easy to see that  , which implies that is invertible on by the Rank-Nullity Theorem, and
, which implies that is invertible on by the Rank-Nullity Theorem, and  for some
for some  and thus is nilpotent on .
and thus is nilpotent on .
Next, we claim that . It is clear from what we have already shown that  . So it suffices to show that every
. So it suffices to show that every  can be written as
can be written as  with
with  and
and  . Without loss of generality (replacing
. Without loss of generality (replacing  by a larger integer if necessary), we may assume that and
by a larger integer if necessary), we may assume that and  for the same . Since
for the same . Since  , we have
, we have  for some
for some  . Then
. Then  so
so  . Setting
. Setting  gives the desired decomposition of
gives the desired decomposition of  .
.
Finally, we show that the decomposition is unique. Suppose  with nilpotent on
with nilpotent on  and invertible on
and invertible on  . Then
. Then  for some positive integer
for some positive integer  , and
, and  for every positive integer . Thus
for every positive integer . Thus  and
and  . By dimension considerations, we must have
. By dimension considerations, we must have  and
and  .
. 
Generalized Eigenvector Decomposition
Let  be an eigenvalue of . A generalized eigenvector for with eigenvalue is a vector such that
be an eigenvalue of . A generalized eigenvector for with eigenvalue is a vector such that  for some positive integer . The generalized eigenspace
for some positive integer . The generalized eigenspace  is the subspace of consisting of all generalized eigenvectors for with eigenvalue . Note that can also be characterized as the nilpotent part of the Fitting Decomposition of
is the subspace of consisting of all generalized eigenvectors for with eigenvalue . Note that can also be characterized as the nilpotent part of the Fitting Decomposition of  .
.
Lemma: If  is nilpotent on and
is nilpotent on and  is non-zero, then
is non-zero, then  is invertible on .
is invertible on .
Proof: Suppose  . Then
. Then  , so
, so  for all positive integers . Choosing large enough so that
for all positive integers . Choosing large enough so that  , we have
, we have  which implies that
which implies that  .
.
Theorem 2 (Generalized Eigenvector Decomposition): Assume that every eigenvalue of (over some extension of ) is defined over , and let  be the distinct eigenvalues of . Then
be the distinct eigenvalues of . Then

Proof: Let  be an eigenvalue of , and let be the Fitting Decomposition of relative to
be an eigenvalue of , and let be the Fitting Decomposition of relative to  . Since
. Since  , it follows by induction that is a direct sum of generalized eigenspaces for . We claim that the generalized eigenspaces of
, it follows by induction that is a direct sum of generalized eigenspaces for . We claim that the generalized eigenspaces of  are precisely the
are precisely the  for
for  . Given this claim, the Theorem follows immediately. To prove the claim, we make the following observations:
. Given this claim, the Theorem follows immediately. To prove the claim, we make the following observations:
(1) Every eigenvalue of restricted to is equal to  for some .
for some .
This follows from the easily verified facts that every eigenvalue of is also an eigenvalue of , and  is not an eigenvalue of .
is not an eigenvalue of .
(2) For , the generalized eigenspace of with respect to equals the generalized eigenspace of with respect to .
Any generalized eigenvector for is automatically a generalized eigenvector for . Conversely, if  for some , then the restriction of
for some , then the restriction of  to
to  is nilpotent, so by the Lemma the restriction of
is nilpotent, so by the Lemma the restriction of  to is invertible. It follows that
to is invertible. It follows that  for all positive integers , so
for all positive integers , so  by the proof of Theorem 1.
by the proof of Theorem 1.
Nilpotent Operators and Cyclic Vectors
A subspace  of is called cyclic with respect to if there is a vector
of is called cyclic with respect to if there is a vector  and a positive integer such that
and a positive integer such that  is a basis for .
is a basis for .
Theorem 3 (Cyclic Decomposition for Nilpotent Operators): If is nilpotent on , then is a direct sum of cyclic subspaces for .
Proof: Suppose that is nilpotent of exponent , i.e.,  on but
on but  . Choose with
. Choose with  and let be the -invariant subspace of spanned by
and let be the -invariant subspace of spanned by  . We claim that has a -invariant complement, i.e., there exists a -invariant subspace of with . Assuming the claim, it follows by induction that is a direct sum of cyclic subspaces for and the Theorem is proved.
. We claim that has a -invariant complement, i.e., there exists a -invariant subspace of with . Assuming the claim, it follows by induction that is a direct sum of cyclic subspaces for and the Theorem is proved.
To prove the claim, let  and let
and let  . Note that the restriction of to
. Note that the restriction of to  has exponent
has exponent  , so by induction there is a -invariant decomposition
, so by induction there is a -invariant decomposition  . Let
. Let  . We make the following two observations:
. We make the following two observations:
(1) 
To see this, note that if we have  and
and  for some
for some  . As
. As  , we have
, we have  .
.
(2) 
Indeed,  implies that
implies that  .
.
By (1) and (2), there exists a subspace with  such that
such that  . (Augment a basis for
. (Augment a basis for  to a basis of using vectors in
to a basis of using vectors in  .) Since
.) Since  , we can take to be the desired -invariant complement.
, we can take to be the desired -invariant complement.
Dénouement
Combining Theorems 2 and 3, we deduce:
Theorem 4 (Jordan Canonical Form): There is an ordered basis for such that the matrix of with respect to is a block sum of elementary  Jordan matrices
Jordan matrices  . The number of Jordan blocks with a given size and given eigenvalue is independent of the choice of .
. The number of Jordan blocks with a given size and given eigenvalue is independent of the choice of .
Proof: By Theorem 2, is a direct sum of generalized eigenspaces  for , and by Theorem 3 each is a direct sum of cyclic subspaces for . Amalgamating the various ordered bases coming from these cyclic subspsaces gives an ordered basis for with the required property. The uniqueness part follows from the easily verified observation that the number of Jordan blocks of size at least and eigenvalue is equal to
for , and by Theorem 3 each is a direct sum of cyclic subspaces for . Amalgamating the various ordered bases coming from these cyclic subspsaces gives an ordered basis for with the required property. The uniqueness part follows from the easily verified observation that the number of Jordan blocks of size at least and eigenvalue is equal to  .
.
Corollary: Assume that is algebraically closed. Then two  matrices and are similar over if and only if they have the same eigenvalues (say ) and for all
matrices and are similar over if and only if they have the same eigenvalues (say ) and for all  and
and  we have
we have  .
.
 A matrix is in Jordan Canonical Form if it is a block sum of elementary Jordan blocks, for example:
A matrix is in Jordan Canonical Form if it is a block sum of elementary Jordan blocks, for example: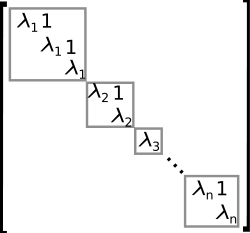

Very nice. At the risk of being pointlessly abstract, to get a decomposition independent of any choices, one can use the Jacobson-Morosov structure theorem for nilpotent operators. This is just the classical name for the Lefschetz-type filtration used for monodromy.
The argument in Theorem 3 is very nice. I remember finding this surprisingly hard to find a good elementary proof for when I did it last year; I think I’ll steal your approach next time. It is worth pointing out that the reason you know is because, otherwise,
is because, otherwise,  would have exponent larger than
would have exponent larger than  .
.
Thanks, David — I’ve incorporated your suggestion to explain in more detail why .
.
Nice article. Just a small remark: it’s clear that V_i and V_n are im T^p and ker T^p, respectively, with the same index p. So, by the rank-nullity theorem, they must have complementary dimension. Consequently, once you’ve (easily) shown that V_n ∩ V_i is trivial, you have V = V_n ⊕ V_i for free.
Good point, thanks!